¿Quién es Mini JERRY?
Mini JERRY ("Jugador Estratégico de Reacción Rápida - version Mini") es un mini robot sumo educativo diseñado para aprender Control PID de forma práctica y visual. Fue creado a partir de las preguntas que recibí después de publicar mi robot sumo en redes sociales, donde muchas personas querían saber exactamente cómo implementaba el algoritmo PID para seguir y reaccionar ante un oponente.
Su objetivo principal no es competir en torneos, sino servir como una plataforma de aprendizaje para estudiantes, makers y entusiastes de la robótica que desean entender cómo funciona el Control PID en un robot real.
¿Cómo funciona?
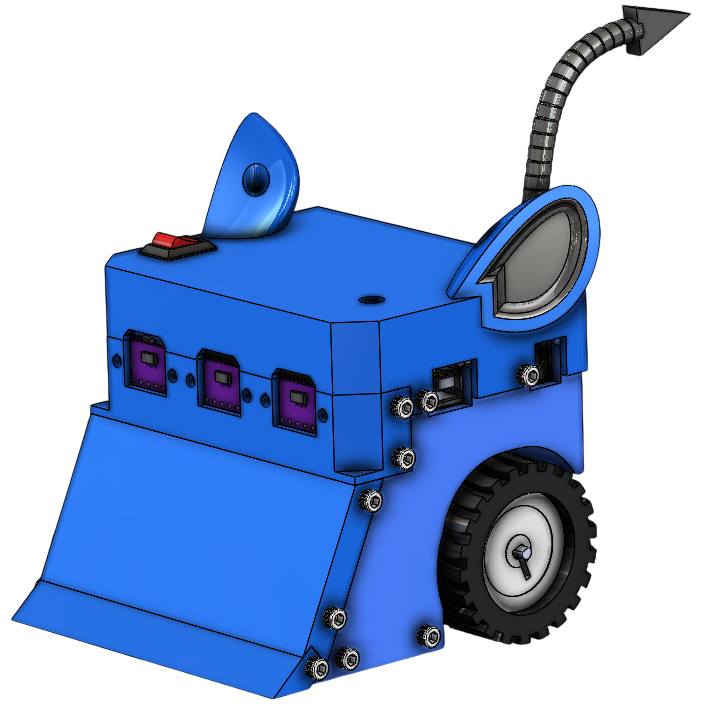
JERRY utiliza un sistema de tracción diferencial impulsado por dos motores pololu N20. Mediante tres sensores frontal, el robot detecta la posición de un objeto u oponente y calcula un error de seguimiento.
A partir de ese error, el algoritmo PID ajusta continuamente la velocidad de cada motor para corregir la trayectoria y mantener el objetivo centrado frente al robot.
La programación incluida permite observar y modificar variables importantes como Kp, Ki y Kd, facilitando la compresinón de cómo cada parámetro afecta el comportamiento del sistema.
Galería



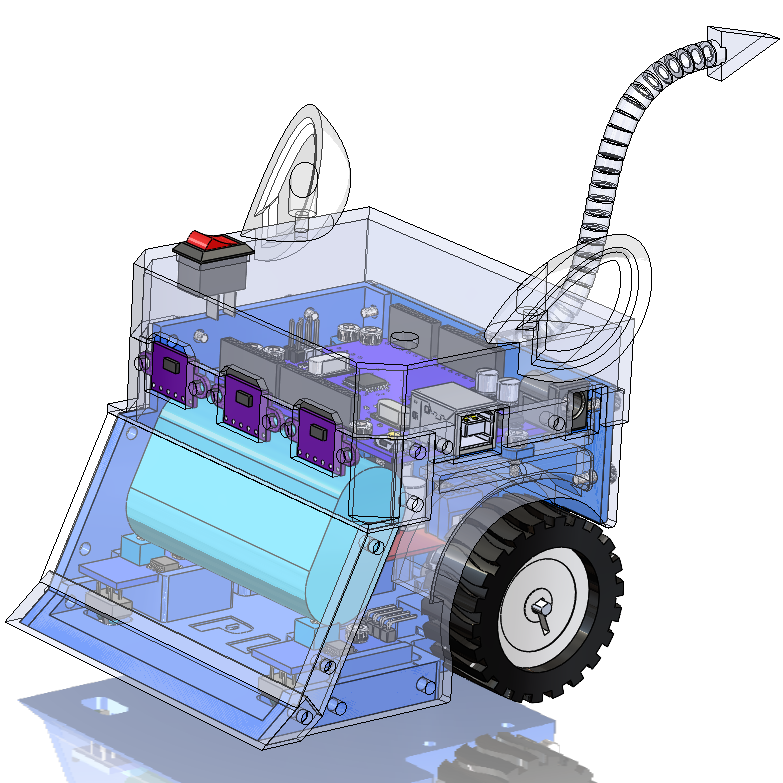
Lista de componentes
-
Arduino Uno. × 1
-
Micro Motorreductor GA12-N20 6V. × 2
-
Llanta 42mm x 19mm para Motorreeductor Pololu N20. × 2
-
Puente H L298N × 1
-
Sensor VL53L0X × 3
-
Modulo infrarrojo TCRT5000 × 2
-
Interruptor KCD11-2P × 1
-
Bateria 18650 de 7.4V 2S1P × 1
-
Torniller M3 × 1 kit
-
Cable Dupont "Jumpers" Macho-Hembra L: 20cm × 1 kit
¿Que incluye la descarga en Cults?
Archivos STL para impresión 3D.
Lista de componentes necesarios para la construcción.
Guía completa de ensamblaje paso a paso.
Diagrama de conexiones.
DIagrama de variables.
Codigo fuente completo y comentado del Control PID.
Documentación en Español e Inglés.
Preguntas frecuentes
No. Se recomienda tener conocimientos báscios de Arduino, pero la documentación incluida explica la estructura general del código y las variables más importantes.
No. El proyecto fue diseñado para funcionar sin placas PCB.
Arduino Uno.
No. JERRY fue desarrollado como una plataforma educativa para aprender Control PID y programación aplicada a la robótica.
El robot cuenta con sensores infrarrojos para esta función, pero la programación incluida se enfoca únicamente en el sistema de seguimiento mediante Control PID.
Sí. El proyecto está pensado para que experimentes con los parámetros y desarrolles tus propias mejoras.
Comunidad — ¿Lo construiste?
Si construiste tu versión de JERRY, comparte una foto. La reviso y la publico aquí para que todos la vean.
Tu construcción
podría aparecer aquí